Sznajd
The Sznajd model [1] is a binary opinion dynamics model inspired by the principle "United we stand, divided we fall." Each node holds a binary opinion \(h \in \{0, 1\}\). At each time step:
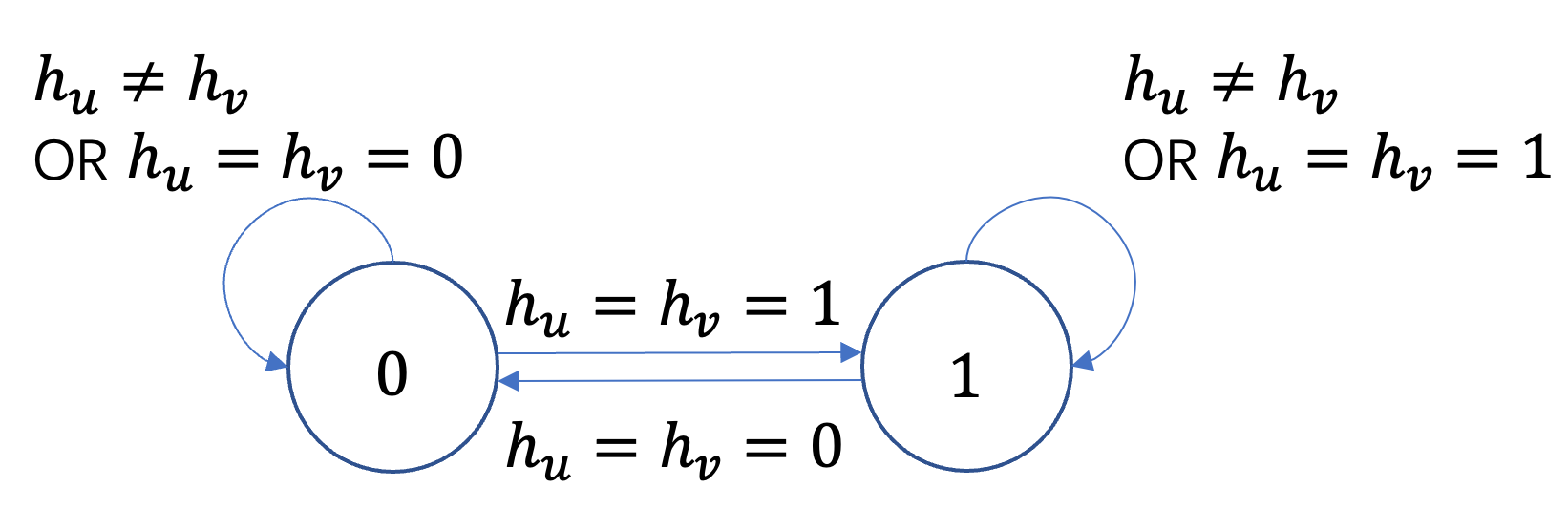
a node \(u\) is selected uniformly at random from the network;
a neighbor \(v \in N(u)\) of node \(u\) is selected uniformly at random;
if \(u\) and \(v\) share the same opinion (\(h_u = h_v\)), all neighbors of both \(u\) and \(v\) adopt that shared opinion;
if \(u\) and \(v\) disagree (\(h_u \neq h_v\)), no opinion change occurs.
Implementation
The Sznajd model propagates consensus along agreed-upon edges: when two connected nodes share the same opinion, they jointly persuade all of their neighbors to adopt that opinion. Self-loops are removed to prevent a node from influencing itself. The model uses max aggregation to broadcast the agreed opinion to the neighborhoods of the two concordant nodes.
A node \(u\) is selected uniformly at random. A neighbor \(v \in N(u)\) is chosen uniformly at random.
If \(u\) and \(v\) agree (\(h_u^{(k-1)} = h_v^{(k-1)}\)), construct an auxiliary signal vector over all nodes:
Propagate \(x\) over the graph using max aggregation. Each node receives the maximum signal among its neighbors:
Nodes adjacent to \(u\) or \(v\) will receive \(h_u^{(k-1)} \in \{0,1\}\), while all other nodes receive \(-1\).
Update opinions for nodes that received a valid signal:
If \(u\) and \(v\) disagree (\(h_u^{(k-1)} \neq h_v^{(k-1)}\)), all opinions remain unchanged: \(h_j^{(k)} = h_j^{(k-1)}\) for every node \(j\).
Status
During the simulation, a node holds a binary opinion value:
Status |
Value |
|---|---|
Opinion |
0 or 1 |
SznajdModel
- class fs_gplib.Opinions.SznajdModel(data, seeds, device='cpu', rand_seed=None)[source]
Bases:
DiffusionModelBinary Sznajd opinion dynamics model on static graphs.
Inspired by "United we stand, divided we fall," each node holds a binary opinion \(h \in \{0, 1\}\). At each step: a node \(u\) is chosen uniformly at random; a neighbor \(v \in N(u)\) is chosen uniformly at random among neighbors of \(u\). If \(h_u = h_v\), all neighbors of both \(u\) and \(v\) adopt that shared opinion; if \(h_u \neq h_v\), no node changes opinion.
Self-loops are removed so a node cannot influence itself. Returned tensors encode opinion
0or1.- Parameters:
data (torch_geometric.data.Data) -- PyTorch Geometric
Datarepresenting \(G=(V,E)\). Must provideedge_indexandnum_nodes.seeds (list[int] | float | None) -- Nodes with initial opinion
1. Pass a list of node IDs, a float in(0,1)to initialise that fraction with opinion1, orNone.device (str | int) -- (optional)
'cpu'or a CUDA device index. Defaults to'cpu'.rand_seed (int | None) -- (optional) Random seed used when seeds is a float. Defaults to
None.
- run_iteration()[source]
Execute a single opinion-update step.
The internal
node_statusis updated so that subsequent calls continue from the latest opinion configuration.- Returns:
Node opinions after one step, shape
(1, N).- Return type:
torch.Tensor
- run_iterations(times)[source]
Execute times opinion-update steps sequentially.
The internal
node_statusis updated in-place so that subsequent calls continue from the latest opinion configuration.- Parameters:
times (int) -- Number of steps to run.
- Returns:
Node opinions at final step, shape
(1, N).- Return type:
torch.Tensor
- run_epoch(iterations_times)[source]
Run a single Monte-Carlo epoch (one independent realisation).
Node opinions are re-initialised before the epoch starts.
- Parameters:
iterations_times (int) -- Number of opinion-update steps per epoch.
- Returns:
Node opinions at final step of the epoch, shape
(1, N).- Return type:
torch.Tensor
- run_epochs(epochs, iterations_times, batch_size=200)[source]
Run multiple independent Monte-Carlo epochs in batches.
Node opinions are re-initialised before the run.
- Parameters:
epochs (int) -- Total number of independent realisations.
iterations_times (int) -- Number of opinion-update steps per epoch.
batch_size (int) -- (optional) Number of epochs processed in parallel per batch. Defaults to
200.
- Returns:
Node opinions at final step of all epochs, shape
(epochs, N).- Return type:
torch.Tensor