SI
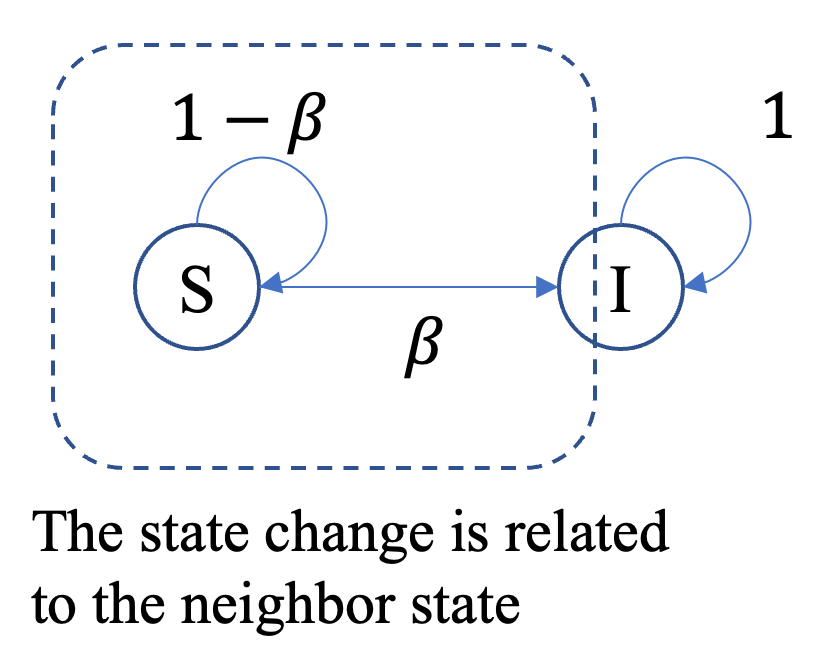
The SI Model [1] assumes that infection spreads only through links between neighboring nodes in a graph \(G=(V,E)\). Each node is in one of two states: \(S\) (susceptible) or \(I\) (infected). A susceptible node \(i\) becomes infected by its infected neighbors \(j \in N(i)\) with rate \(\beta\):
Implementation
Node transitions follow two rules: 1) if a \(S\) state node has \(I\) state neighbors, each \(I\) state neighbor transmits the infection to the \(S\) state node with probability \(\beta\); 2) once infected, the node remains infected forever.
Node states are represented by a Boolean indicator vector \(h \in \{0,1\}^N\),
where \(h_i=1\) denotes infected and \(h_i=0\) denotes susceptible.
The update of the system at step \(k\) is decomposed into three stages:
Each infected neighbor \(j\) of node \(i\) transmits a log-probability contribution
Node \(i\) collects contributions from all neighbors \(N(i)\) to compute its infection probability
The indicator variable is updated with independent uniform random variables \(U_i^{\mathrm{inf}} \sim \mathrm{Uniform}(0,1)\):
Status
During the simulation, a node can be in one of the following states:
Status |
Code |
|---|---|
Susceptible |
0 |
Infected |
1 |
SIModel
- class fs_gplib.Epidemics.SIModel(data, seeds, infection_beta: float, device='cpu', use_weight: bool = False, rand_seed=None)[source]
Bases:
DiffusionModelSI (Susceptible-Infected) diffusion model on static graphs.
Each node starts as susceptible or infected (seed). At every step each infected neighbor independently transmits the disease with probability \(\beta\). Once infected a node stays infected permanently.
- Parameters:
data (torch_geometric.data.Data) -- PyTorch Geometric
Dataobject representing graph \(G=(V,E)\). Must containedge_index(the edge set \(E\)) andnum_nodes(\(|V|\)). When use_weight isTrue,edge_attrsupplies per-edge weights \(w_{ji}\).seeds (list[int] | float) -- Nodes whose initial state is Infected. Pass a list of node IDs, or a float in (0, 1) to infect that fraction of nodes chosen uniformly at random.
infection_beta (float) -- Per-contact infection probability \(\beta \in [0,1]\).
device (str | int) -- (optional)
'cpu'or a CUDA device index. Defaults to'cpu'.use_weight (bool) -- (optional) If
True, each edge \((j,i)\) carries a weight \(w_{ji}\) fromdata.edge_attrand the infection probability becomes \(\beta w_{ji}\). IfFalseall weights default to 1 (i.e. \(w_{ji}=1\)). Defaults toFalse.rand_seed (int | None) -- (optional) Random seed used when seeds is a float. Defaults to
None.
- run_iteration()[source]
Execute a single simulation step.
The internal
node_statusis updated so that subsequent calls continue from the latest state.- Returns:
Node states after one step, shape
(1, N).- Return type:
torch.Tensor
- run_iterations(times: int)[source]
Execute times simulation steps sequentially.
The internal
node_statusis updated in-place so that subsequent calls continue from the latest state.- Parameters:
times (int) -- Number of steps to run.
- Returns:
Node states at final step, shape
(1, N).- Return type:
torch.Tensor
- run_epoch(iterations_times)[source]
Run a single Monte-Carlo epoch (one independent realisation).
Node states are re-initialised before the epoch starts.
- Parameters:
iterations_times (int) -- Number of simulation steps per epoch.
- Returns:
Node states at final step of the epoch, shape
(1, N).- Return type:
torch.Tensor
- run_epochs(epochs: int, iterations_times: int, batch_size: int = 200)[source]
Run multiple independent Monte-Carlo epochs in batches.
Node states are re-initialised before the run.
- Parameters:
epochs (int) -- Total number of independent realisations.
iterations_times (int) -- Number of simulation steps per epoch.
batch_size (int) -- (optional) Number of epochs processed in parallel per batch. Defaults to
200.
- Returns:
Node states at final step of all epochs, shape
(epochs, N).- Return type:
torch.Tensor